Hiệu chỉnh góc lái
Mỗi chiếc xe RC đều được lắp ráp tỉ mỉ, tuy nhiên có thể tồn tại sai số nhỏ trong hiệu chỉnh góc lái do cơ cấu cơ khí. Ví dụ: khi bạn đặt góc lái thẳng (90°), bánh xe thực tế có thể lệch vài độ sang trái hoặc phải. Đây không phải lỗi, mà là đặc điểm tự nhiên của quá trình lắp ráp thủ công.
Giải pháp
Để khắc phục sai số này, tôi thiết lập các tham số khởi tạo nhằm giới hạn và hiệu chỉnh lại góc lái.
Tham khảo code Arduino tại đây: Control_CDS_ver3.ino
Ở đầu code, bạn sẽ thấy các tham số cố định (Hình 1):

Hình 1. Các tham số cấu hình góc lái trong code
Nguyên lý tín hiệu Servo
Servo lái được điều khiển dựa vào độ rộng xung PWM:
1000µs → 1500µs: quay sang trái (0° → 90°)
1500µs: vị trí trung tâm (90°)
1500µs → 2000µs: quay sang phải (90° → 180°)
Một số điểm quan trọng:
Cơ cấu lái thực tế của xe không sử dụng toàn bộ dải 0° → 180° của servo. Giới hạn an toàn thường nằm trong khoảng 50° → 130°.
Vượt quá giới hạn này có thể khiến servo bị kẹt, quá tải và cháy; hoặc làm gãy các khớp cơ khí (Hình 2).
Nếu ở vị trí 90° không trùng với hướng thẳng của xe, bạn có thể hiệu chỉnh lại bằng tham số SERVO_CENTER.
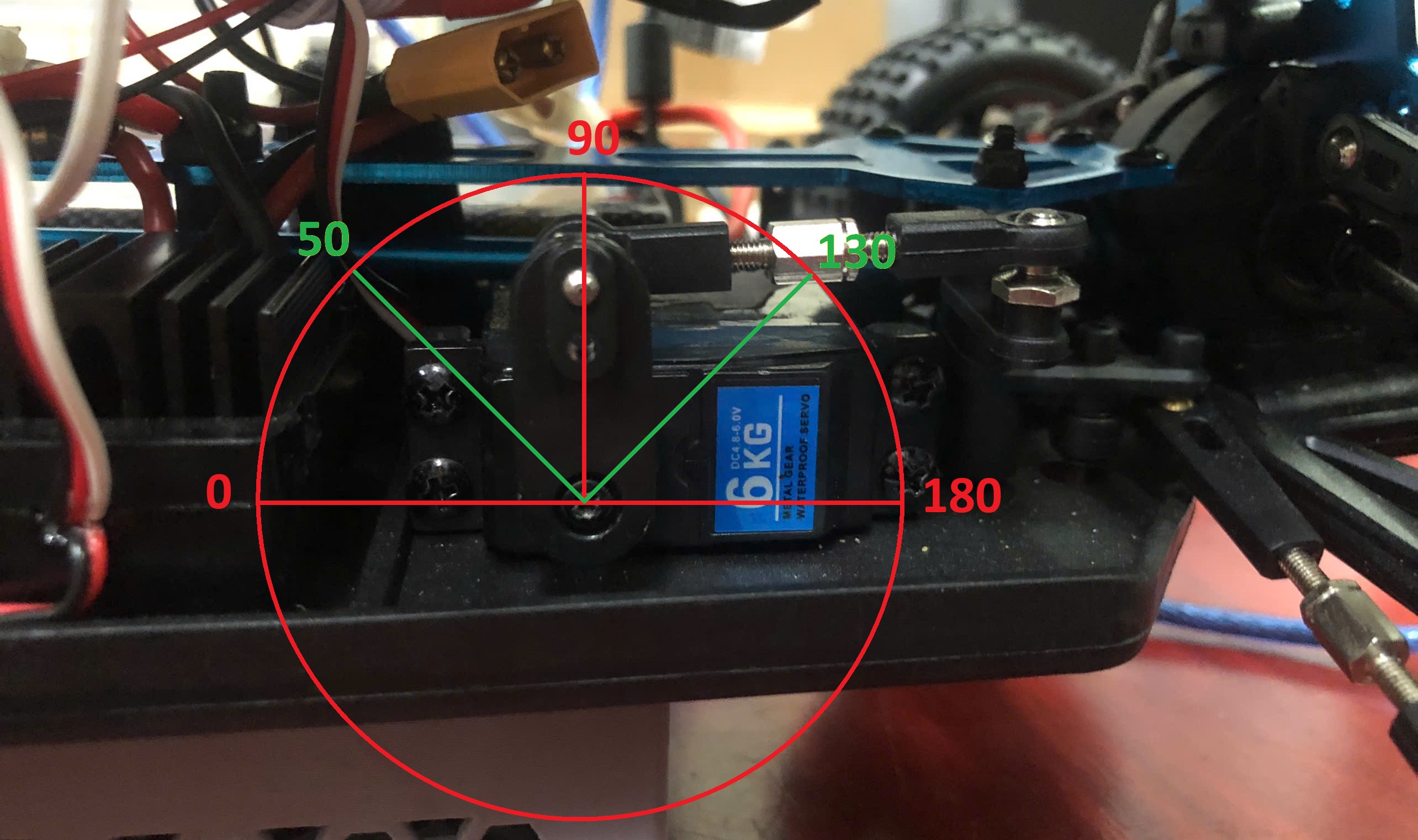
Hình 2. Giới hạn góc lái an toàn
Tổng kết các tham số
Bạn có thể tinh chỉnh lại các tham số góc lái để phù hợp với từng xe:
Chỉnh sửa trong file code Arduino Control_CDS_ver3.ino:
SERVO_LEFT_MAX = 50; → Góc trái tối đa
SERVO_CENTER = 90; → Vị trí trung tâm
SERVO_RIGHT_MAX = 130; → Góc phải tối đa
Chỉnh sửa trong file Python control.py:
speed = max(min(speed, 50), -25) → Giới hạn tốc độ do phần mềm. Xe không bao giờ vượt quá 50 (tiến) hoặc -25 (lùi).
angle = max(min(angle, 25), -25) → Giới hạn góc lái trong khoảng [-25°, 25°] để tránh servo vượt quá giới hạn cơ khí.
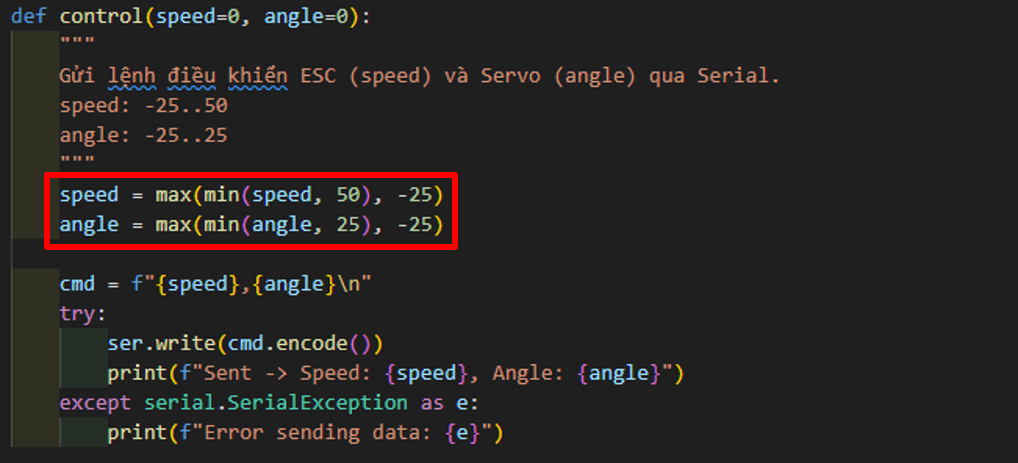
Hình 3. Điều chỉnh giới hạn tốc độ trong code
Ví dụ cấu hình:
// Giới hạn servo lái
const int SERVO_LEFT_MAX = 50; // Góc trái tối đa
const int SERVO_CENTER = 90; // Trung tâm
const int SERVO_RIGHT_MAX = 130; // Góc phải tối đa